Трикоптер своими руками.
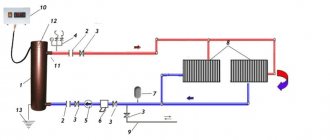
В изготовлении этой модели нет каких-либо принципиально новых решений, в основном она построена на основе следующих материалов: — «Трикоптер (Квадрокоптер своими руками: Часть II.2)» https://security-corp.org/hard/diy/3700-trikopter-kvadrokopter-svoimi-rukami-chast-ii2.html ; — «Форум. Трикоптер» https://forum.rcdesign.ru/f123/thread156768.html В этих источниках процесс сборки изложен очень подробно, поэтому я не буду останавливаться на деталях. Для изготовления модели было использовано вполне бюджетное оборудование: — полётный контроллер КК2.1 (достаточно простой и надёжный контроллер, параметрируется прямо в поле, с ЖК-экрана, единственно что на мой взгляд ему не хватает это — барометра, для автоматического поддержания заданной высоты. При переходе с самолётного управления достаточно сложно перестроиться именно из-за того, что появляется ещё одна степень свободы и приходится компенсировать смещение модели по вертикали. С опытом это проходит и начинаешь держать нужную высоту на «автомате», но на начальном этапе обучения хотелось бы конечно, чтобы эту функцию выполнял контроллер, однако тогда и цена контроллера тогда будет значительно выше): Плата управления полетом мультироторных систем Hobbyking KK2.1.5 LCD, 6050MPU и Atmel 644PA Товар https://www.parkflyer.ru/ru/product/1204422/ — двигатели (очень надёжные двигатели не подводили ни разу за 2 года эксплуатации, не перегреваются): Turnigy Aerodrive DST-1200 1200 Об/В бесколлекторный двигатель Товар https://www.parkflyer.ru/ru/product/403252/ — пропеллеры (требуют обязательной балансировки) Пропеллеры 8045 SF (цвет красный) 2шт. стандартного вращения / 2шт. обратного вращения. Товар https://www.parkflyer.ru/ru/product/510247/ — регуляторы (не беспокойтесь что ток всего 12 А — для указанных выше пропеллеров работают в нормальном режиме, не перегреваются. Регуляторы были перепрошиты по этой статье https://flydrones.ru/reinkarnatsiya-plush-a/ , если честно, то я не заметил особой разницы после перепрошивки…): Регулятор для бесколлекторных двигателей HobbyKing 12A «Синяя серия» Товар https://www.parkflyer.ru/ru/product/100891/ — хвостовая серва (простая и надёжная серва, за погода эксплуатации сбоев не было, при крашах конечно обычно её срывает, фактически это одно из самых слабых мест трикоптера, но при аккуратных полётах служит без нареканий): Turnigy™ TGY-50090M Analog Servo MG 1.6kg / 0.08sec / 9g Товар https://www.parkflyer.ru/ru/product/529858/ — поворотный хвостовой механизм (достаточно компактен и быстр в установке, но имеет и недостатки — необходимо регулярно прочищать и смазывать шестерни, т.к. в них легко попадает грязь и пыль, если вовремя не прочистить заклинит прямо в полёте…): RotorBits крепление сервомашинки с зубчатой передачей (зелёное) Товар https://www.parkflyer.ru/ru/product/1201692/ — аккумулятор (отличный народный аккумулятор, не так давно был ещё и очень дешевым, для данной конфигурации хвтает на 10 — 15 минут непрерывного динамичного полёта, к концу полёта — чуть тёплый, т.е. 20С вполне достаточно): Turnigy 2200mAh 3S 20C Lipo Pack Товар https://www.parkflyer.ru/ru/product/8932/ — для управления использую самый бюджетный комплект радиоуправления (именно этот комплект — настраивается через компьютер и позволяет выстраивать требуемую «кривую газа», что как раз желательно для комфортного поддержания заданной высоты полёта) Приемник/передатчик Hobby King 2.4Ghz 6Ch V2 (Mode 2 газ слева) Товар https://www.parkflyer.ru/ru/product/9042/ Всё остальное сделано из пластин текстолита (1,5 мм) и алюминиевых профилей (10 мм), чертежи деталей см. (Tricoptertemplate.pdf) — позаимствован из указанных выше источников. Ножки — велосипедные спицы, прикручены к профилям леской, оказалось очень надёжным и простым решением. Корпуса для контроллера и двигателей выполнены по «чулочной» технологии: на болванку, вырезанную канцелярским ножом из пенопласта, поверх целлофана натягиваются два слоя капроновых колготок, далее покрываются эпоксидной смолой. Раскрашено акриловыми красками, сюжет для кабины мне попался на одном из разделов данного сайта. Вот фото со снятым корпусом:
Настройки контроллера следующие (летаю пока в режиме Self-Level — on ): PI Editor: Roll: P Gain: 45; P Limit: 100; I Gain: 15; I Limit: 20; Pitch: P Gain: 45; P Limit: 100; I Gain: 15; I Limit: 20; Yaw: P Gain: 45; P Limit: 20; I Gain: 50; I Limit: 10; Stick Scaling: Roll: 30 Pitch: 30 Yaw: 30 Throttle: 90 Self-Level Settings: P Gain: 55; P Limit: 100; Misc. Settings: Servo filter: 70 Mode Settings: Self-Level: AUX; Link Roll Pitch: Yes; Auto Disarm: Yes; CPPM Enabled: No. Это видео полёта: видео снято при температуре -17 градусов, шел снег, дул средний порывистый ветер (4…6 м/с). Как видите, модель держится достаточно устойчиво. Вообще хочется сказать, что данная конфигурация слабо чувствительна к погодным условиям. Раньше, когда я увлекался только самолётами, перед выездом в поле я постоянно смотрел прогнозы, иногда из-за сильного ветра вообще отказывался от запланированной поездки. С данным коптером всё стало гораздо проще: — во первых вовсе не обязательно выезжать за город, футбольного поля или даже баскетбольной площадки уже достаточно, а облёт препятствий или пролёт через ворота добавляют остроты полётам; — во вторых можно летать практически в любую погоду, даже если вдруг заморосил дождь (регуляторы я герметично упаковал в воздушные шарики, двигатели воды и снега не боятся, контроллер и приёмник достаточно хорошо укрыт корпусом, а если дождь — то на контроллер сверху натягивается обычная медицинская перчатка). — ну и в третьих складная рама очень компактна, в сложенном виде убирается в обычном пакете, раскладывается одним движением, с транспортировкой нет никаких проблем. Конечно на коптере, в отличии от самолёта, не выполнишь красивых пилотажных фигур или даже простейшего пилотажного комплекса (хотя есть конечно комплексы для вертолётов, которые неплохо подходят именно трикоптеру, поскольку он схож в управлении с вертолётом). Но зато на коптере можно зависнуть в непосредственной близости (спокойно полюбоваться на парящую в воздухе модель), летать в любом направлении и с любой скоростью, сбрасывать прицельно грузы, парашюты и многое другое… В общем есть свои плюсы и минусы. Но если кто-нибудь решит для себя попробовать коптер, то я очень рекомендую Вам именно эту модель. Поверьте приложив достаточно терпения, Вы не останитесь разочарованы результатом!
С уважением и наилучшими пожеланиями в творчестве.
Сколько стоит ремонт квадрокоптера DJI
Приведу небольшую таблицу, в которой распишу средние цены на ремонт коптера DJI. Пока это статья существует информация актуальна. Если вы заметили какие-то несостыковки, напишите свой комментарий.
ремонт квадрокоптера DJI
Средние цены на ремонт квадрокоптеров DJI Phantom
| Наименование ремонта | Среднее время ремонта | Средняя цена, руб |
| Ремонт и замена GPS модуля | 60 минут | 3000 |
| Замена NAZA | 50 минут | 3000 |
| Ремонт и замена мотора | 60 минут | 2000 |
| Ремонт корпуса, замена компонентов | 120 минут | 4000 |
| Замена компаса | 50 минут | 2000 |
| Ремонт и замена подвеса VISION | 180 минут | 5000 |
| Ремонт и замена подвеса ZENMUSE | 120 минут | 3000 |
| Ремонт и замена регулятора вращения | 180 минут | 3500 |
| Ремонт и замена деталей центральной платы | 120 минут | 5000 |
| Ремонт и замена Шасси | 40 минут | 1000 |
| Замена шлейфа | 50 минут | 3000 |
| Установка и модернизация FPV системы | 120 минут | 3000 |
| Установка бустера | 50 минут | 3000 |
| Установка DJI Light Bridge | 220 минут | 3000 |
| Установка и подключение DJI Bluetooth Ground Station | 60 минут | 3000 |
| Установка подвесов ZENMUSE | 80 минут | 3000 |
| Ремонт камера VISION | 40 минут | 3000 |
| Ремонт подвеса Vision Plus | 180 минут | 3000 |
| Модернизация прошивки и калибровка | 40 минут | 1000 |
Как видите ремонт квадрокоптера может оказаться удовольствием не из дешевых, но все же если вас настигла такая участь как сломанный дрон, то обращайтесь за помощью в сервисные центры или к частным мастерам. У этих ребят однозначно есть необходимые запчасти и лицензионные программы для перепрошивки.
Я же вам желаю всего доброго, и обращайтесь к своим летающим товарищам бережно.
Модель с литиевыми аккумуляторами
На литиевых аккумуляторах квадрокоптер с камерой отзывы, как правило, получает хорошие. Котроллеры для устройств подходят проводного и дискретного типа. В данном случае мотор подбирается на 2 или 3 кВт. Передатчик используется высокочастотного типа. Варисторы разрешается устанавливать через диодный мост. Во многих случаях конденсаторы используются емкостного типа.
Параметр приводимости у них равняется 6 мк. Перед подключением мотора на устройстве проверяется отрицательное сопротивление. Данный параметр не должен превышать 55 Ом. В среднем частота приемника равняется 30 Гц. Модификации со стабилитронами встречаются редко. Аккумуляторы устанавливаются под мотором. Рамы разрешается делать на две и три стойки.
Усилитель-отражатель на антенну
Начнем с самого простого решения — установка пассивного усилителя-отражателей на антенну.
Чертежи можно взять в статье Усилитель для антенны квадрокоптера.
Не смотря на простое изготовление и весьма несерьезный вид, такой пассивный усилитель сигнала позволяет увеличить дальность полета квадрокоптера в 0.5-2 раза. В статье по ссылке выше есть видео положительный тестирования такого девайса с коллекторным квадрокоптером, из своего опыта скажу, что эта штука действительно работает и дальность полета увеличивается.
На видео выше производится тест параболического отражателя, дальность полета дрона с ним увеличилась на 30%. У других тестеров дальность полета увеличивается до 2-х раз, тут все зависит от загаженности эфира в месте полета.
Такой способ усилить сигнал работает с любыми передатчиками, не только произведенными фирмой DJI.
Если нет желания «рукожопить» параболический усилитель-отражатель, то можно купить уже готовые варианты усилителей сигнала.
Transmitter Antenna Signal Enhancement Купить: BangGood Phantom 3 S/SE дистанционного Купить: AliExpress Black Mirror Plate Foldable Купить: BangGood Пульт дистанционного управления усилитель Купить: AliExpress
Отзывы о модели с четырьмя стойками
Сделать квадрокоптер с камерой FPV на четыре стойки довольно просто. В первую очередь следует заняться фюзеляжной частью. Для этого сооружается пластиковый каркас. Диаметр винтов должен составлять около 3,3 см. Триггер для модели подбирается контактного типа. Мотор используется на 2,2 кВт. Предельная частота приемника не должна превышать 3 Гц. Для управления устройством используется адаптер. Устанавливать его можно через выпрямитель либо диодный мост.
В первом варианте конденсаторы используются открытого типа. Если рассматривать модификацию с диодным мостом, то конденсатор в квадрокоптеры с большим радиусом действия устанавливается с обкладкой. Емкость элемента обязана составлять не менее 6 пФ. Перед подключением контроллера следует проверить отрицательное сопротивление. Указанный параметр для модели на 2,2 кВт не должен превышать 55 Ом.
Как произвести замену антенны пульта управления
На видео выше производится модернизация квадрокоптера Syma для увеличения дальности полета путем замены штатной антенны-проводка на внешнюю с большим dBi.
А на этом видео установка внешней антенны на пульт FrSky Taranis.
Как видите, процедура очень простая, требует только аккуратности и умения паять, от типа пульта — практически не зависит.
Если вы только начинаете свой путь в мир радиоуправления, то смотрите статью Какой пульт управления дроном выбрать.
Обзор устройств с мотором на 3 кВт
Как собрать на 3 кВт квадрокоптеры с большим радиусом действия своими руками? Многое эксперты в данном случае мотор советуют устанавливать на подкладке. Также важно отметить, что датчик высоты целесообразнее использовать конденсаторного типа. Непосредственно приемник применяется на 3 Гц. Для стабилизации модели в полете имеется стабилитрон. Устанавливается он через переходник. Для подключения устройства используется варистор.
Продается он проходного и импульсного типов. Для того чтобы сделать фюзеляж, используется пластиковая рама. С мотором на 3 кВт целесообразнее ее подбирать на четыре стойки. Для передачи сигнала на приемник применяется триод. Указанный элемент можно устанавливать только через выпрямитель. Диодный мост в данном случае не потребуется. Длина рамы должна составлять около 23 см. Высота квадрокоптера при моторе 3 кВт равняется не более 12 см. Аккумуляторы многие эксперты рекомендуют устанавливать литий-ионного типа. Емкость их не должна превышать 200 А·ч.
Мощная антенна на пульт управления
Следующее решение требует умения «ткнуть паяльником» и «разобрать пульт управления дроном». Вместо штатной антенны устанавливается антенна от WiFi роутера с большим коэффициентом усиления (dBi).
Фактически, необходимо отпаять штатную антенну и на ее место впаять провод от разъема, а к нему можно крепить уже любую антенну.
Вот вариант использования самодельной Vee антенны вместе с внешним ВЧ блоком.
Так как аппаратура радиоуправления авиамоделями и дронами работает на частоте 2.4 ГГц, то к ней прекрасно подходят антенны от WiFi, которые работают на той же частоте.
На квадрокоптере, для увеличения дальности полета, тоже не лишним будет заменить штатную антенну на имеющую большее усиление.
Вот варианты готовых антенн и разъемов для них.
2.4GHz RP-SMA Male 16dBi Купить: BangGood Cewaal Новый 2.4 ГГц Купить: AliExpress 2.4GHz 5dBi Wireless Wifi Купить: BangGood Бесплатная доставка 2,4 ГГц Купить: AliExpress Mini RP-SMA to IPX Купить: BangGood Удлинитель UFL на RP Купить: AliExpress
Устройства с тремя стойками
Квадрокоптеры с большим радиусом действия и камерой FPV на три стойки встречаются очень часто. Моторы под указанные устройства подбираются небольшой мощности. Адаптеры чаще всего применяются с частотными приемниками. Параметр проводимости у них не превышает 3 мк. Триггеры для квадрокоптеров используются с переходниками. В первую очередь для сборки сооружается каркас.
Длина рамы обязана составлять около 33 см. Высота квадрокоптера допускается в 12 см. Стойки необходимо делать из пластика. Минимальный диаметр винта составляет 2,5 см. Для стабилизации устройства в полете устанавливается селектор. Указанный элемент подключается через проводник. Также важно отметить, что многие эксперты рекомендуют использовать датчики высоты. Аккумуляторы для квадрокоптеров подходят литий-ионного типа.
Сборка устройства с двумя аккумуляторами
Квадрокоптеры с большим радиусом действия и камерой, у которых имеются два аккумулятора, можно сделать только на базе мощного мотора. Минимальная длина рамы равняется 40 см. Весит в среднем устройство около 3 кг. Для управления модификацией используется котроллер. Если рассматривать модель с цифровым элементом, то триггер применяется дискретного типа. Как правило, частота квадрокоптеров находится на уровне 5 Гц. Выходное сопротивление колеблется в районе 30 Ом.
Если рассматривать модификации с оперативными контроллерами, то конденсаторы целесообразнее устанавливать на волновой основе. Для стабилизации устройства в полете применяются демпферы. Многие эксперты регуляторы подбирают с обкладкой. Минимальная длина винта составляет 3,5 см. Триггеры у модификации подсоединяться обязаны через диодный мост.